Závěr projektu se blíží
![]()
Závěr projektu Modernizace vzdělávání spěje ke svému konci.
A proto jsme se rozhodli, že se s výsledky své práce pochlubíme.
V pátek 25. dubna 2014 jsme uspořádali pro okolní školy workshopy a výstavu našich prací.
Naše pozvání přijali žáci ze ZŠ Nádražní, žáci ze ZŠ Dolní Věstonice, studenti Gymnázia T. G. Masaryka a žáci ze Speciální a praktické školy v Hustopečích.
Hned u vchodu do školy si příchozí mohli prohlédnout výstavu prací žáků 1. stupně. Viděli hokejistu sestaveného z lega, který střílí do brány,modely hasičské stanice. Zkoušeli svým foukáním přesunout loďku na druhou stranu „jezera“. Seznámili se s výrobky páťáků, kteří sestrojili modely bubnující opice, krokodýla, který otvíral tlamu, tancující ptáčata. Děti z kroužku lego-modelování vystavily modely rozhleden (vzorem jim byla hustopečská rozhledna), modely středověkých hradů, mučíren, katapultu. Předvedly také modely vojenských aut.
V 1. patře přístavby pak byly nachystány workshopy.
Workshop KA6 a MMČ
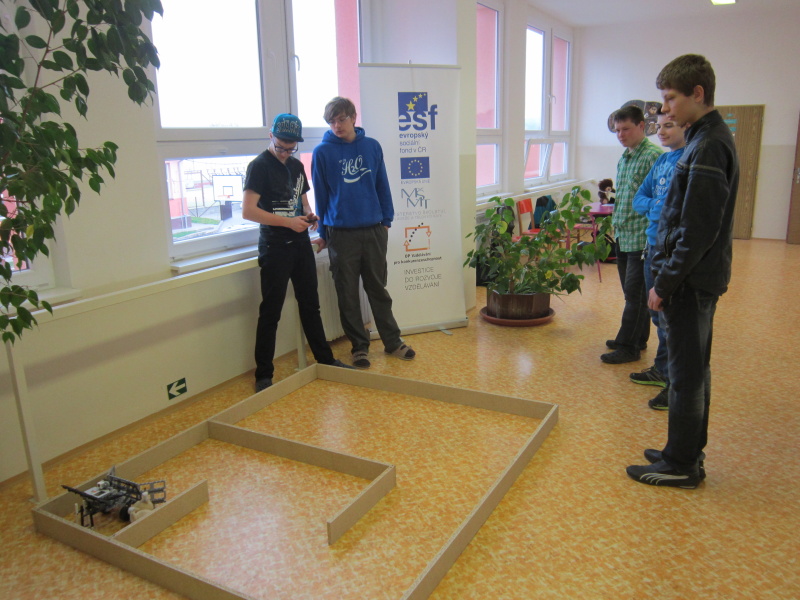
1.stanoviště - Zachraňte medvěda
Chlapci z IX. A zde přestavili svůj model robota, se kterým se umístili na celorepublikové soutěži Robotiády v Brně na 6. místě. Robot byl dálkově řízený, musel projet bludištěm, najít medvěda
a přivézt ho zpátky na startovací místo. Příchozí žáci si mohli obtížnost tohoto úkolu vyzkoušet. Nejlepší čas na měřený během workshopu – 38s.
2. stanoviště – Projekty
Na tomto stanovišti ukázaly žákyně z IX. C, co všechno se dá postavit ze stavebnic Lega Mindstorms. Např. motorová pila, past na myši, dveřní alarm, balerína, gymnastka, robotické rameno, vysokozdvižný vozík, auta na ovládání, kytara, kulomet, sekačka. Nápady i se stavebním postupem lze najít na webových stránkách nxt.programs.cz.
Hoši z IX. C předvedli robota Průzkumníka, který využíval při pohybu dotykový a ultrazvukový senzor.
3. stanoviště – Jízda po čáře
Zde kluci z IX. C opět představili model svého vlastního robota, se kterým soutěžili v disciplíně Jízda po čáře (umístili se na 11. místě) a situaci modelovali na zkrácené verzi čáry. Robot musel sledovat klikatou černou čáru a nesměl vyjet z dráhy, jinak byl diskvalifikován. Pro přesnost pohybu po čáře využíval robot dva světelné senzory.
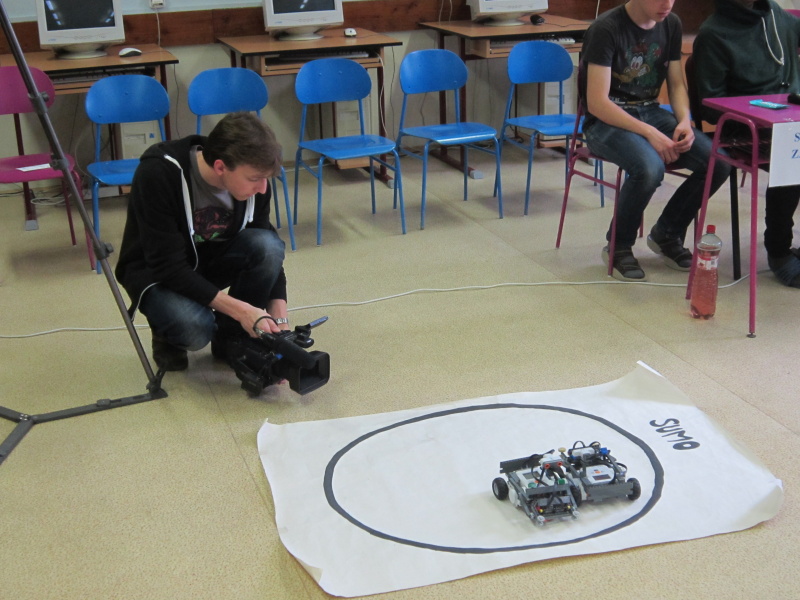
4. stanoviště – Sumo zápas
Deváťáci se nechali inspirovat disciplínou, která se objeví v červnu na robotické soutěži v Praze. Vytvořili si zápasnický kruh (opět omezen černou čárou, ze které nesměl robot vyjet) a dva roboty, kteří spolu zápasili. Jelo se na několik kol a vyhrál ten robot, který vícekrát vytlačil toho druhého robota. Při stavbě modelů museli kluci použít světelný a ultrazvukový senzor.
5. stanoviště – Programování s NXT kostkou
Zde si mohli všichni účastníci workshopu vyzkoušet pod vedením chlapců z IX. C programování pomocí jednoduchých příkazů v NXT kostce. Každý si vylosoval jednoduchý příklad a robota se pokusil rozpohybovat. Vcelku se všem dařilo úkoly splnit.
6. stanoviště – Jednoduché programování se softwarem Lego Mindstorms
Na tomto stanovišti si mohli opět účastníci workshopu vyzkoušet, jak se programuje v software Lega Mindstorms. Hoši z IX. B nejprve ukázali několik jednoduchých příkladů (např. jízda do čtverce,
jízda v kruhu), seznámili účastníky se základy programování a ti pak mohli sami programovat.
Workshop KA5
Stanoviště na chodbě:
1. Vzdálený záznam dat pomocí bezdrátového dataloggeru DataVision se senzory pro měření teploty, tlaku vzduchu, vlhkosti vzduchu, intenzity světelného záření a vnějšího hluku – datalogger bude umístěn před budovou školy. Spojení mezi DataVision a počítačem zajišťuje technologie Bluetooth.
2. Monitor tepové frekvence – možnost změřit tepovou frekvenci v klidu a při zátěži
Stanoviště v učebně:
1. Měření teploty - pomocí tepelného senzoru můžeme změřit teplotu v lidské dlani a vyzkoušet, zda-li třením rukou o sebe opravdu vzniká teplo
2. Měření pH roztoků vybraných nápojů a jiných potravin – zjistíme, jaké pH má např.mléko, ocet, limonáda nebo Coca-Cola
3. Měření intenzity magnetického pole - pomocí senzoru změříme změnu intenzity magnetického pole uvnitř cívky v závislosti na velikosti procházejícího proudu.
4. Měření vzdálenosti pomocí ultrazvukového čidla - čidlo vysílá podobně jako sonar ultrazvukový paprsek, který se odráží od překážky a čidlo ho zpětně snímá. Počítač pak přepočítá čas mezi vysláním a příjmem signálu a dle známé rychlosti zvuku ve vzduchu vypočítá vzdálenost od překážky s přesností na milimetry.
5. Měření obsahu oxidu uhličitého (CO2) ve vzduchu - tento senzor dokáže detekovat oxid uhličitý
ve vzduchu s přesností v ppm (milióntiny celku - desetitisíciny procenta). Můžeme měřit jak přirozený obsah CO2 ve vzduchu v učebně, tak i ve vydechovaném vzduchu z plic, a následně porovnat rozdíl
6. Měření síly – zaznamenáme data vysílané senzorem síly při kmitání závaží na pružině